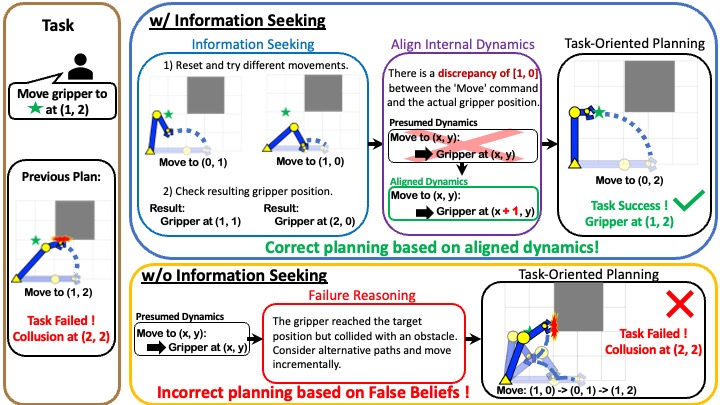
Explicit information seeking is essential to human problem-solving in practical environments characterized by incomplete information and noisy dynamics. When the true environmental state is not directly observable, humans seek information to update their internal dynamics and inform future decision-making. Although existing Large Language Model (LLM) planning agents have addressed observational uncertainty, they often overlook discrepancies between their internal dynamics and the actual environment. We introduce Information Seeking Decision Planner (InfoSeeker), an LLM decision-making framework that integrates task-oriented planning with information seeking to align internal dynamics and make optimal decisions under uncertainty in both agent observations and environmental dynamics. InfoSeeker prompts an LLM to actively gather information by planning actions to validate its understanding, detect environmental changes, or test hypotheses before generating or revising task-oriented plans. To evaluate InfoSeeker, we introduce a novel benchmark suite featuring partially observable environments with incomplete observations and uncertain dynamics. Experiments demonstrate that InfoSeeker achieves a 74% absolute performance gain over prior methods without sacrificing sample efficiency. Moreover, InfoSeeker generalizes across LLMs and outperforms baselines on established benchmarks such as robotic manipulation and web navigation. These findings underscore the importance of tightly integrating planning and information seeking for robust behavior in partially observable environments.
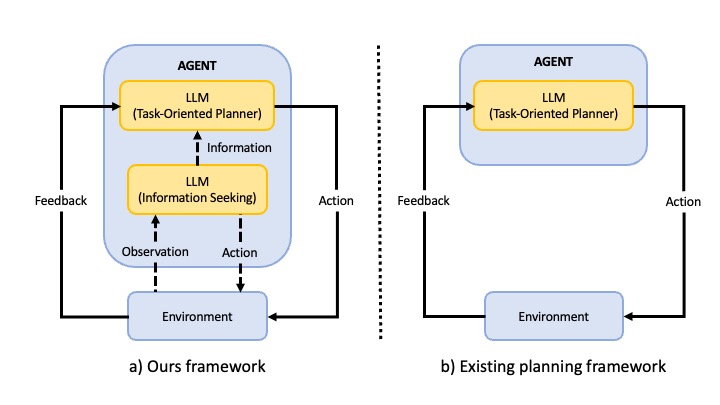
Comparison with Prior LLM-Based Planners. (a) InfoSeeker validates its internal dynamics before planning, while (b) existing approaches depend solely on execution feedback and fixed assumptions. This difference enables InfoSeeker to succeed in environments with uncertain observations and dynamics.
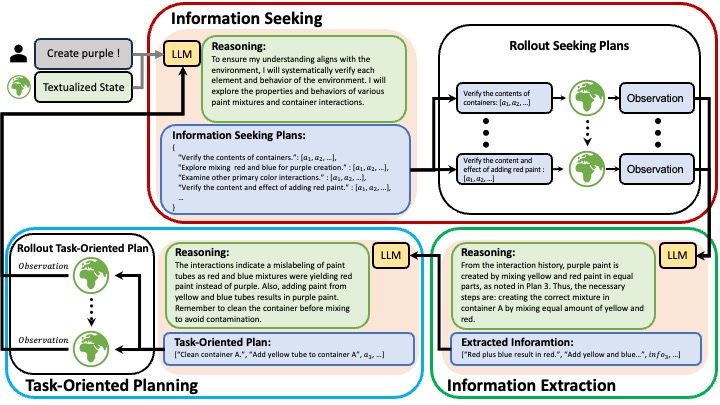
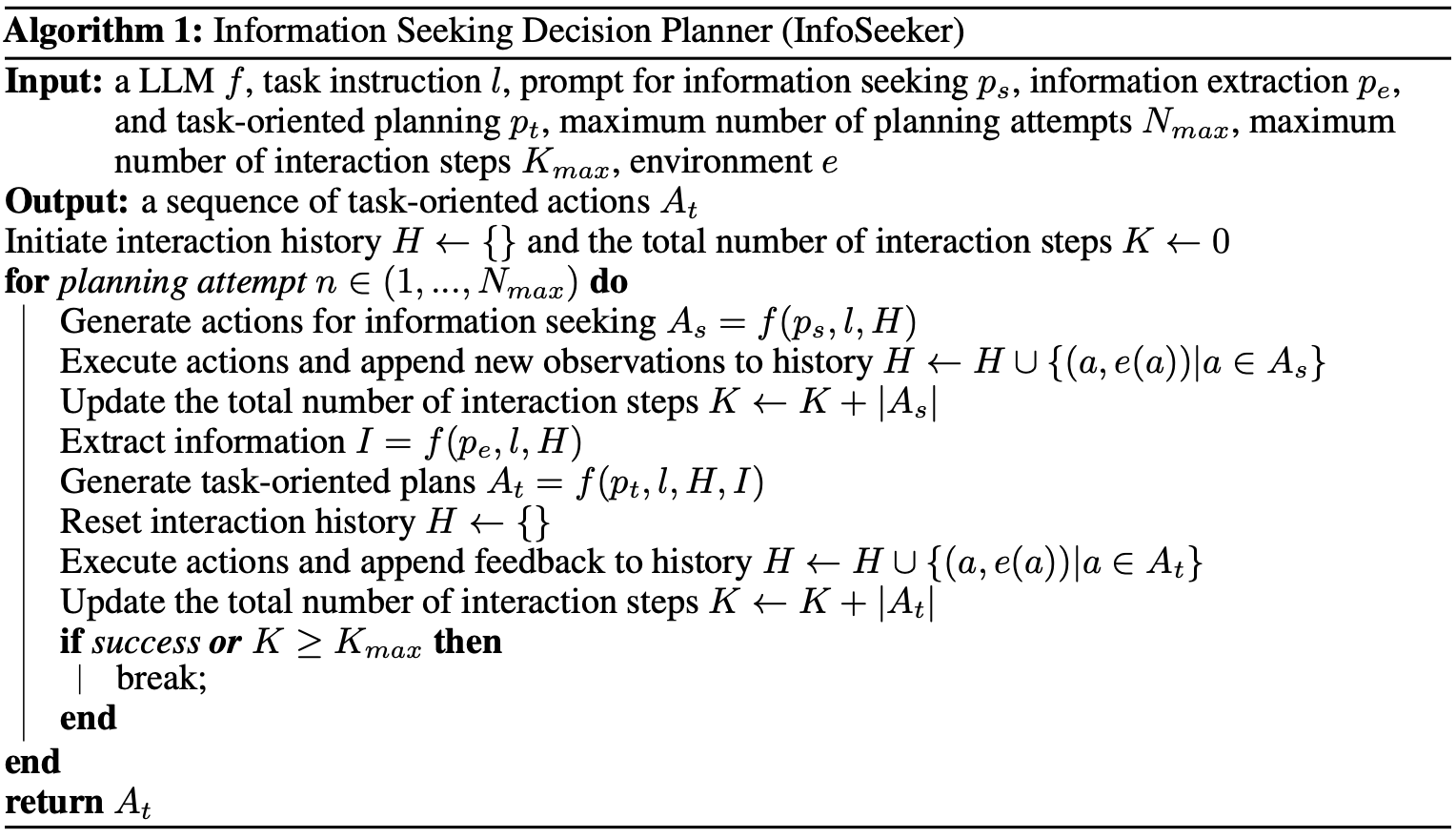
System Architecture Overview. Our InfoSeeker integrates Information Seeking (top-right) and Task-Oriented Planning (bottom-left) in a closed-loop process. InfoSeeker formulates and executes strategies to acquire missing knowledge, addressing gaps in its internal dynamics before generating more effective task plans. This iterative approach, supported by the reasoning capabilities of LLMs, enables InfoSeeker to reduce uncertainty and enhance planning effectiveness.
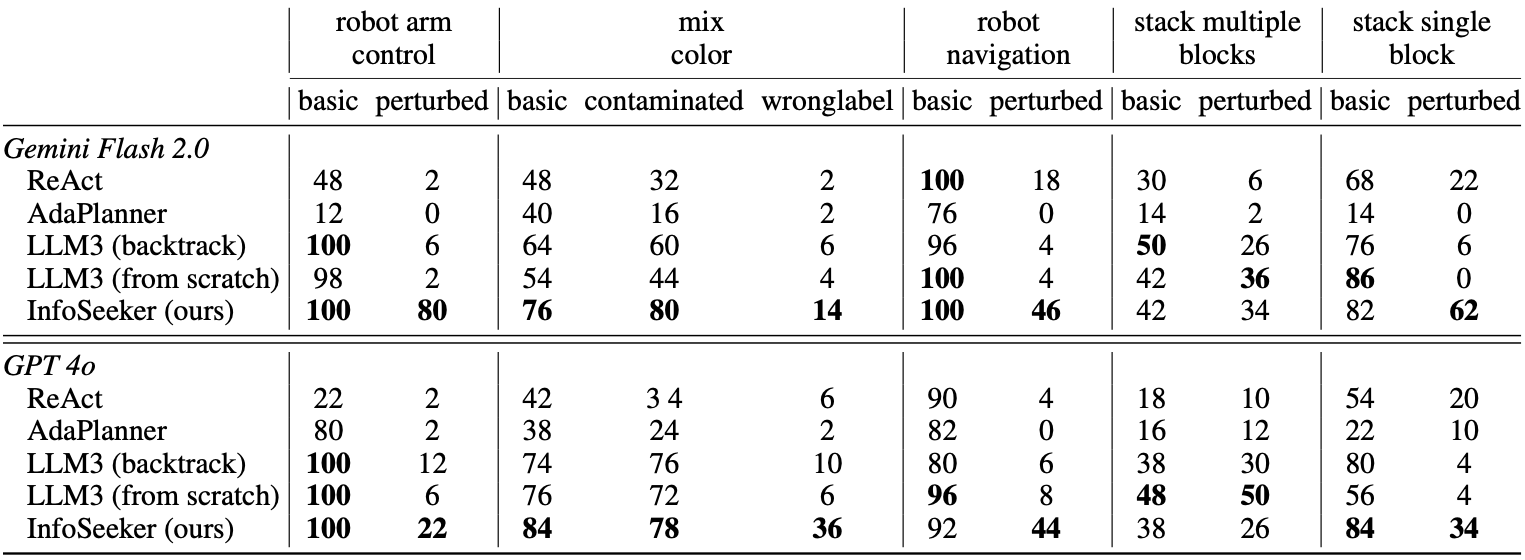
Performance Evaluation on the Proposed Benchmark. We report the success rate (%), defined as the proportion of tasks successfully completed within 100 interaction steps per task instance. We evaluate two LLMs across five planning methods. By incorporating active information seeking, InfoSeeker consistently achieves higher success rates, particularly under perturbed conditions.
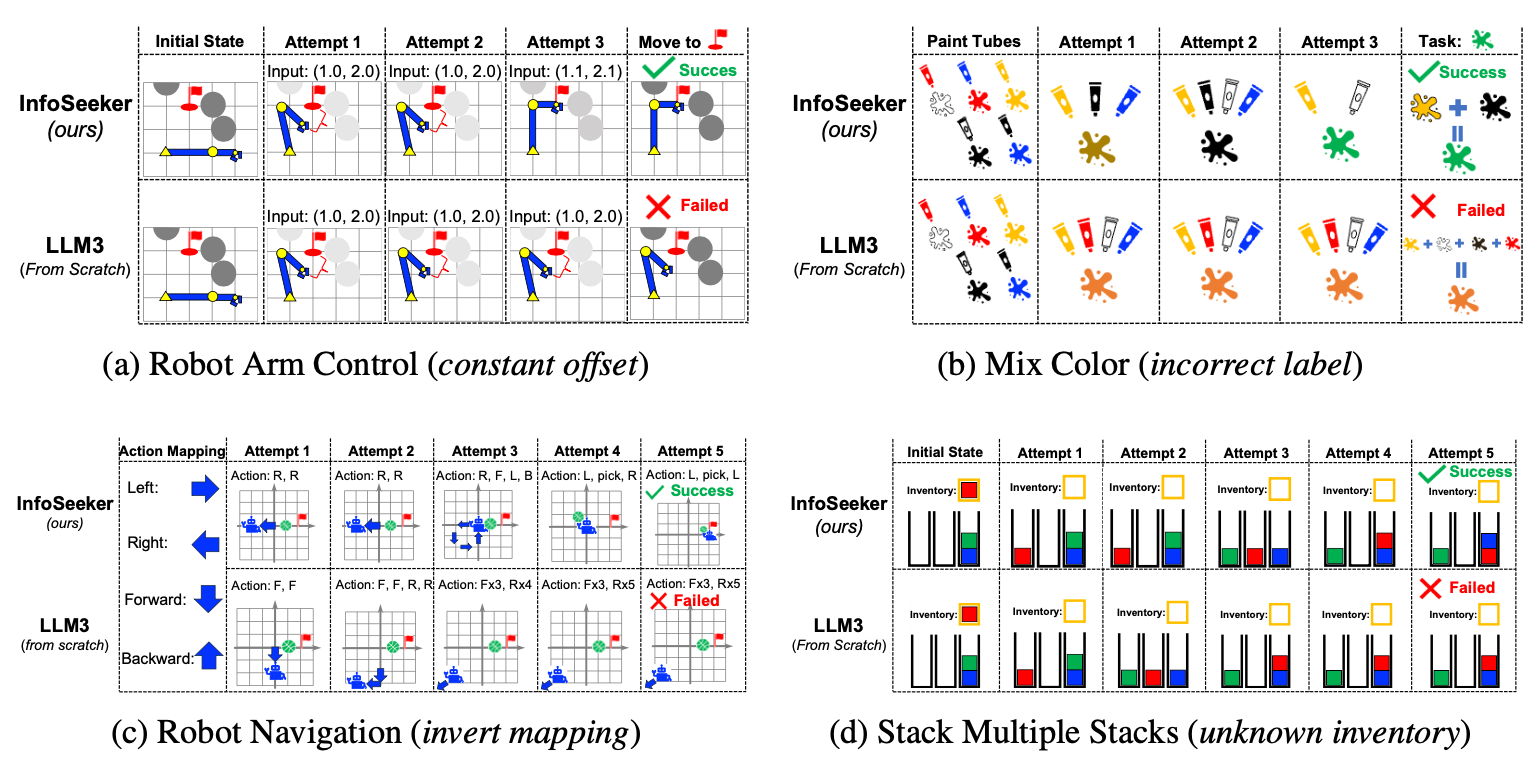
Visualization of InfoSeeker and LLM3 (from scratch) in perturbed environments. (a) Robotic arm guidance to target (1.0, 2.0) with a fixed action offset (-0.1, -0.1). (b) Paint mixing for seagreen (yellow + black) using mislabeled tubes: the "red" tube contains white, "blue" contains red, "white" contains black, and "black" contains blue. (c) Navigate to ball at (1, 0) and deliver it to goal location (2, 0) under inverted action mappings ("left" moves right, "forward" moves backward). (d) Rearranging blocks to match a target configuration, starting with a hidden inventory (contains a red block). Across these perturbations, InfoSeeker adapts through information seeking and feedback, while LLM3 repeatedly failed due to persistent misinterpretation.
Check our GitHub about how to setup and try InfoSeeker for yourself !
We introduce a suite of text-based simulation benchmarks for evaluating the robustness of LLM agents in partially observable environments with noisy environmental dynamics. Existing benchmarks consider only uncertainty in observations, where actions always yield predictable outcomes (e.g., “turn on lamp” action exactly turns on the lamp). In contrast, we consider incorporating uncertain dynamics: actions may fail due to unmodeled factors, such as control errors or environmental noise. This setup highlights the critical challenges of decision-making in real-world scenarios. To contrast agent performance under both certain and uncertain dynamics, we implement each task in two configurations: a Basic version, which resembles existing benchmarks, and a Perturbed version that additionally incorporates noisy dynamics.
git clone https://github.com/InfoSeekerLLM/InfoSeeker.git
conda create -n infoseeker python=3.12
conda activate infoseeker
pip install -r requirements.txt
python human.py --task block_stacking_multiple_basic
block_stacking_multiple_basic
block_stacking_multiple_perturbed
block_stacking_single_basic
block_stacking_single_perturbed
mix_color_basic
mix_color_contaminated
mix_color_wronglabel
robot_arm_basic
robot_arm_perturbed
robot_navigation_basic
robot_navigation_perturbed
@misc{2510.01531,
Author = {Djengo Cyun-Jyun Fang and Tsung-Wei Ke},
Title = {Information Seeking for Robust Decision Making under Partial Observability},
Year = {2025},
Eprint = {arXiv:2510.01531},
}